


인체 측정학
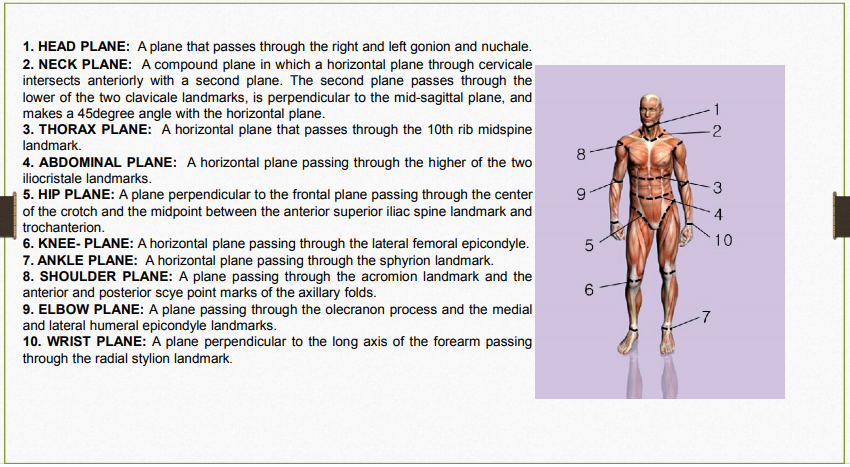
세 가지 평면
측단면, 정단면, 횡단면
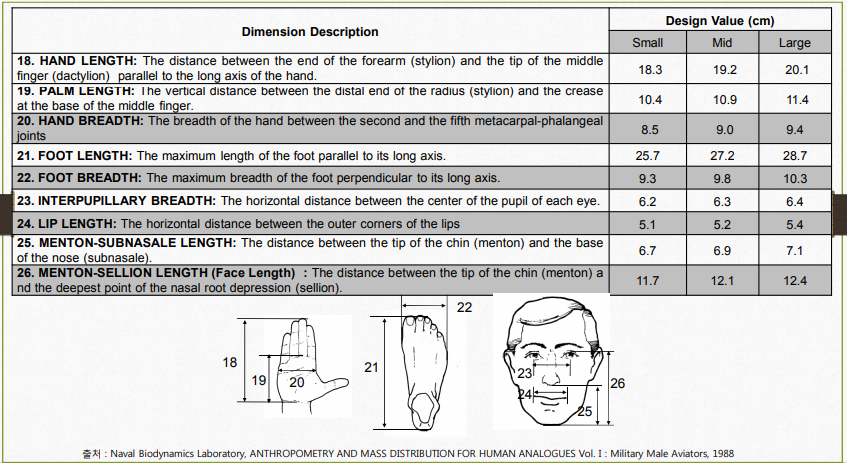
###길이
몸통 치수

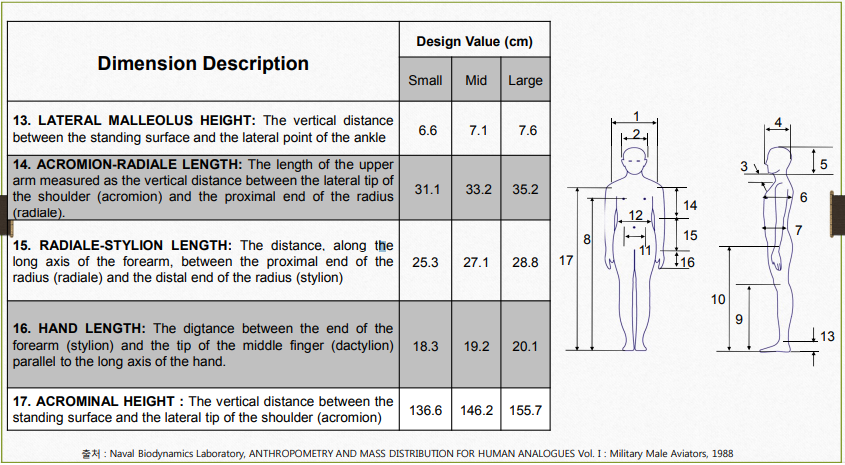
이렇게 사람의 싸이즈별로 통계를 넬수 있다
특징
발목 ~ 고관절 까지의 길이는 키의 절반이다
고관절 키의 10프로 정도
대태부 와 정강이의 길이는 거의 같다
발의 길이 키의 15%
발의 두꼐는 5.5%정도이다
이렇게 비율로 나누어 사용하면 좋다
다리의 길이가 길경우
안정성이 떨어진다
보행할때 에너지소요가 많아진다
폭이 넣을때
과우 골반 움직임이 많아진다
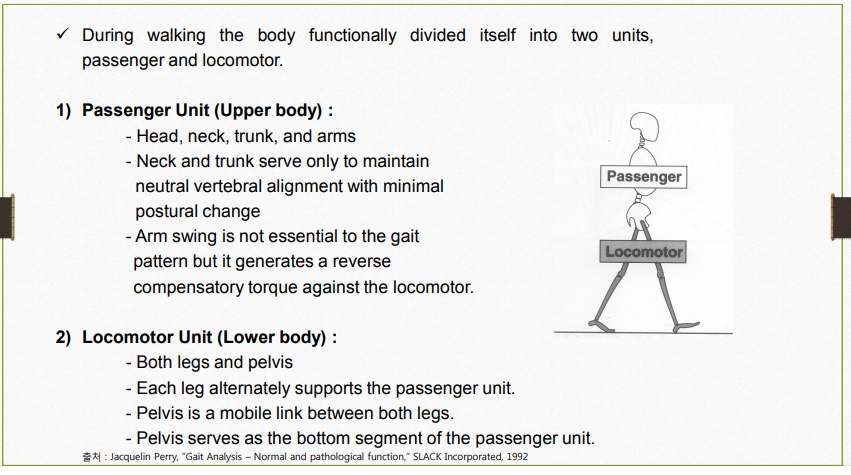
###질량
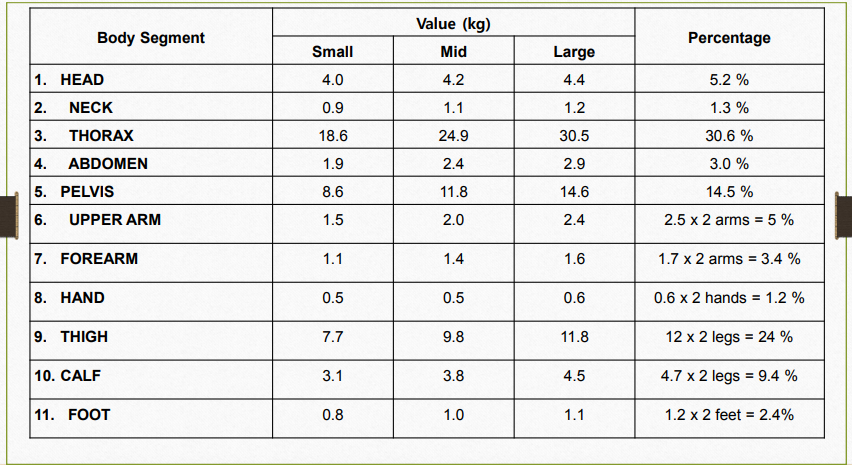
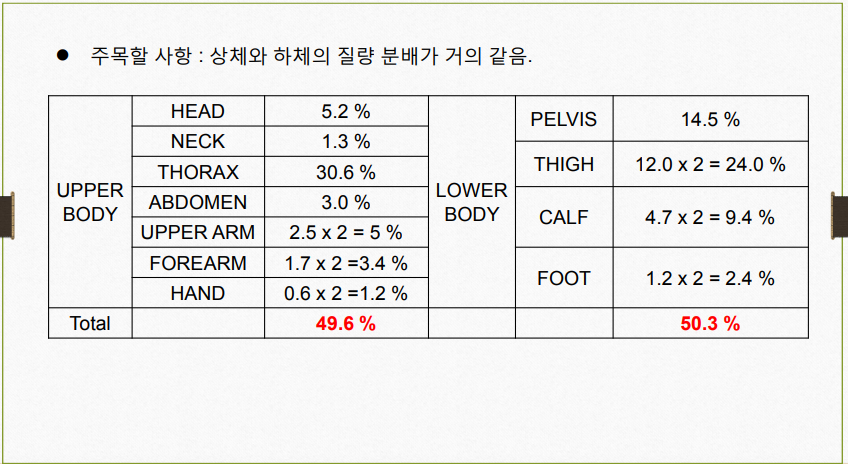
질량의 분배에 대한 것
상체와 하체가 거의 반으로 비슷하게 나눠져 있다
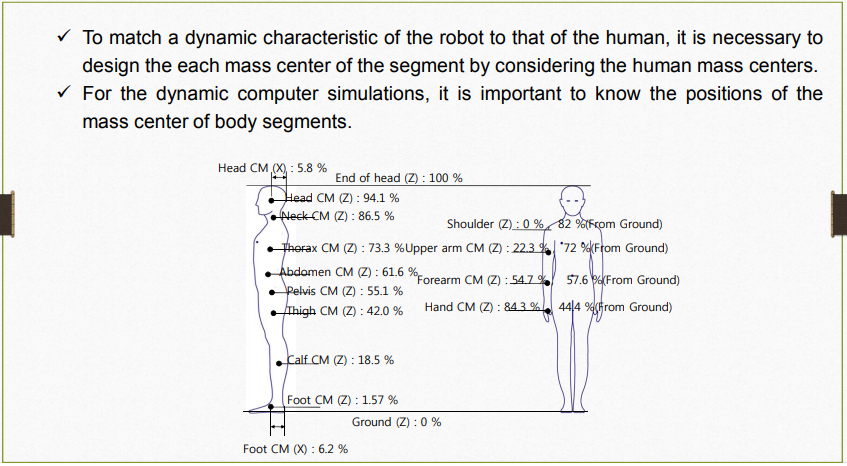
질량의 중심위치 또한 중요한 요소이다
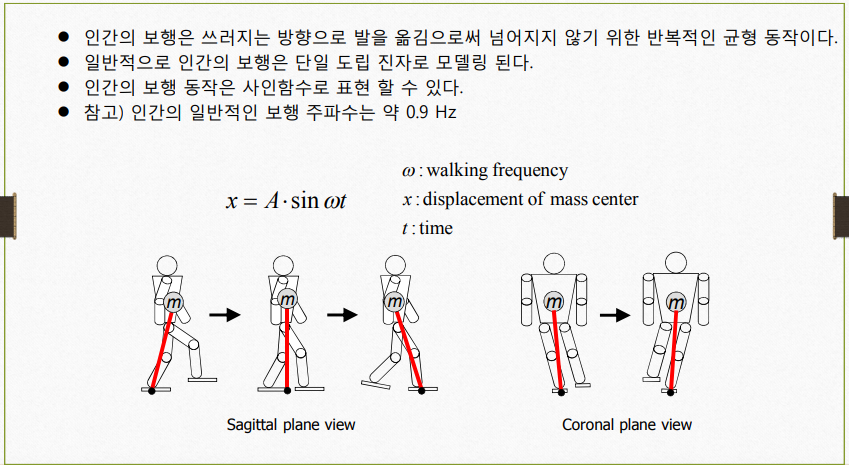
###보행 매커니즘
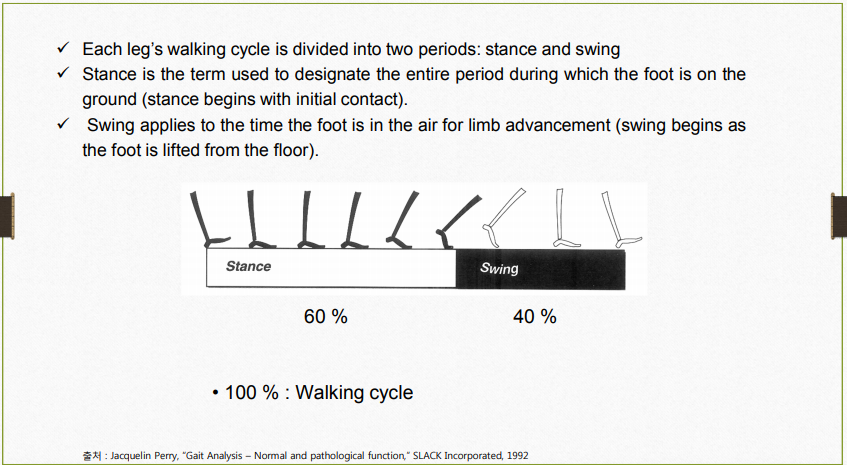
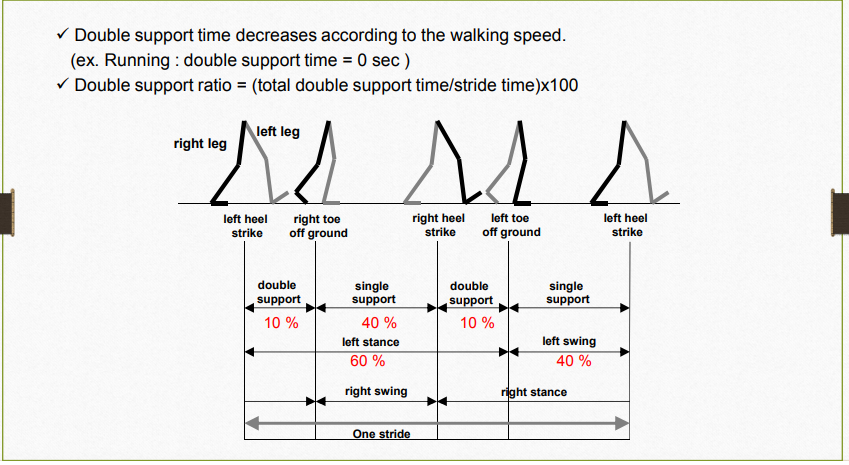
보행할때 2개의 다리가 붙어있을때 한개의 다리가 붙어있을때 그리고 다떨어져있을 때가 있다
그 주기를 나누어 사람의 모습처럼 분석을 한다
추진을 하기위해서
기울기를 만들고 중심을 잡아준다
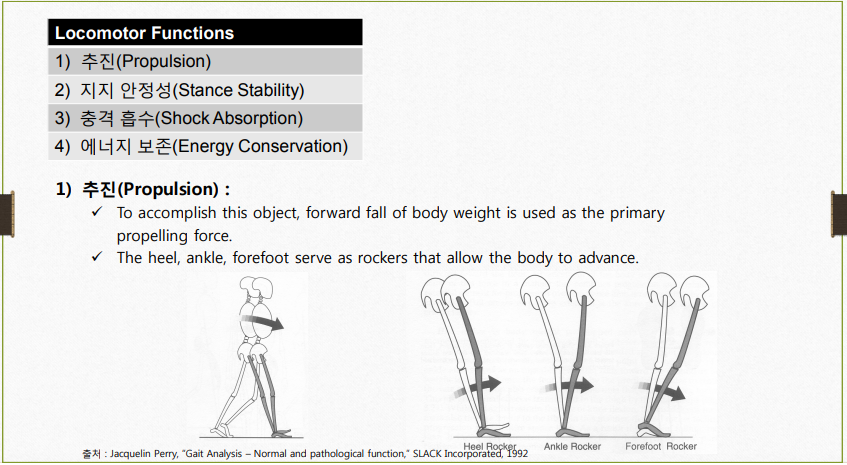

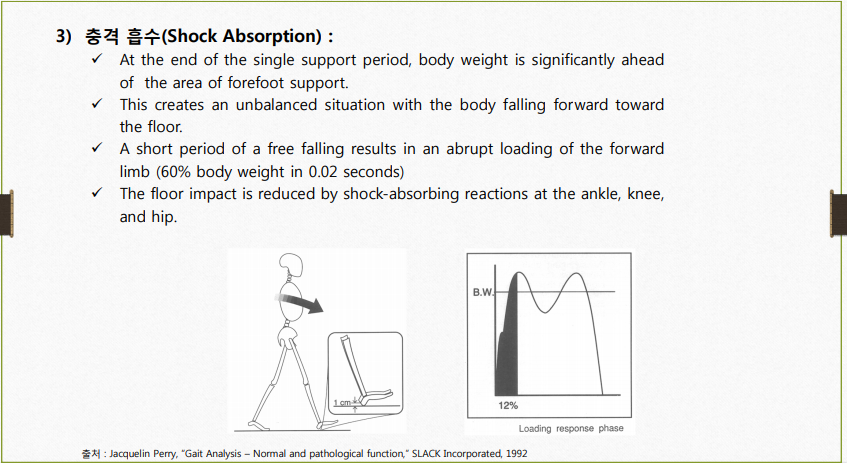
이렇게 보행자가 디딜때 많은 에너지가 하중에 가게된다
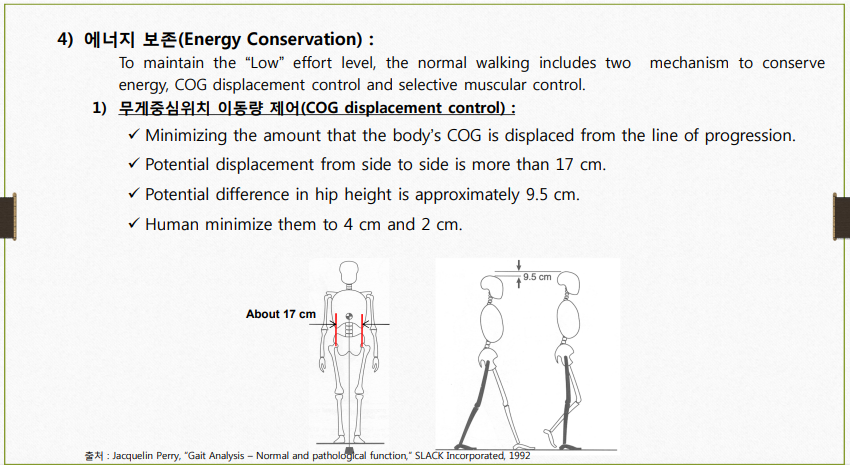
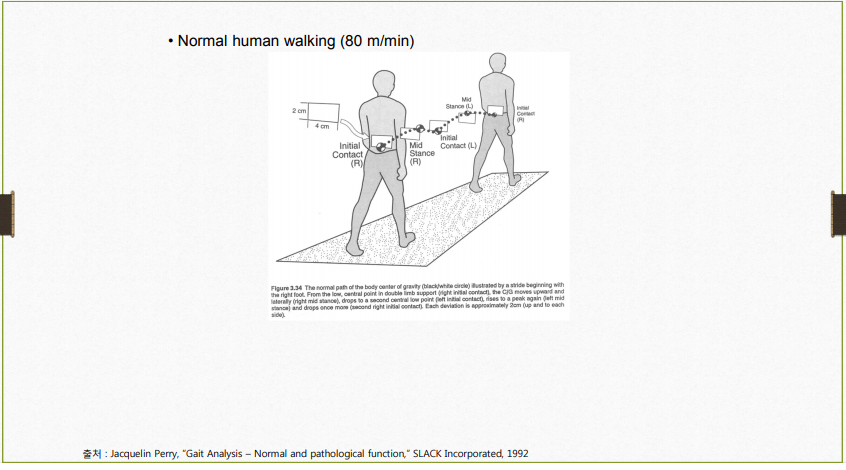
에너지를 보존하기위하여 중심출을 최대한 적게 움직인다
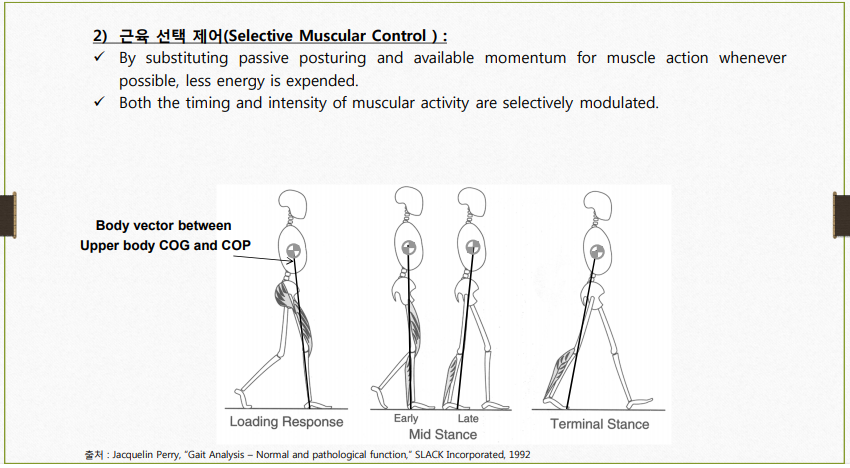
근육을 사용하지 안게하면서 에너지를 적게 사용한다
하체의 부위별 이동량을 보겠다

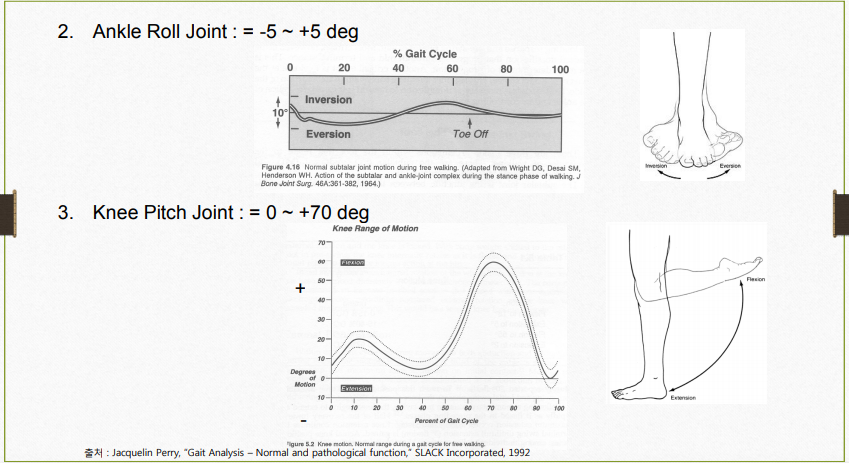
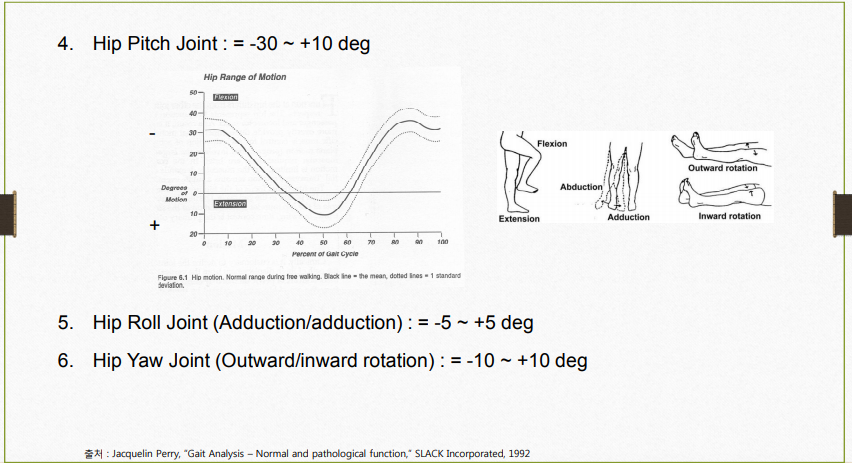
이 각도를 이용하여 사람의 움직임을 할 수 있다
'K-MOOC > 휴머노이드' 카테고리의 다른 글
| 휴머노이드 6주차 하모니 감속기 (0) | 2020.06.03 |
|---|---|
| 휴머노이드 5주차 구동기의 종류 (0) | 2020.06.02 |
| 휴머노이드 4주차 관절 운동 해석 (0) | 2020.05.17 |
| 휴머노이드 3주차 인간과 휴머노이드 비교 (0) | 2020.05.16 |
| 휴머노이드 1주차 (0) | 2020.05.16 |

Or71nH