















'K-MOOC > 휴머노이드' 카테고리의 다른 글
| 휴머노이드 6주차 하모니 감속기 (0) | 2020.06.03 |
|---|---|
| 휴머노이드 5주차 구동기의 종류 (0) | 2020.06.02 |
| 휴머노이드 4주차 관절 운동 해석 (0) | 2020.05.17 |
| 휴머노이드 3주차 인간과 휴머노이드 비교 (0) | 2020.05.16 |
| 휴머노이드 2주차 인체측정학 보행 메커니즘 (0) | 2020.05.16 |

Or71nH
| 휴머노이드 6주차 하모니 감속기 (0) | 2020.06.03 |
|---|---|
| 휴머노이드 5주차 구동기의 종류 (0) | 2020.06.02 |
| 휴머노이드 4주차 관절 운동 해석 (0) | 2020.05.17 |
| 휴머노이드 3주차 인간과 휴머노이드 비교 (0) | 2020.05.16 |
| 휴머노이드 2주차 인체측정학 보행 메커니즘 (0) | 2020.05.16 |
Or71nH
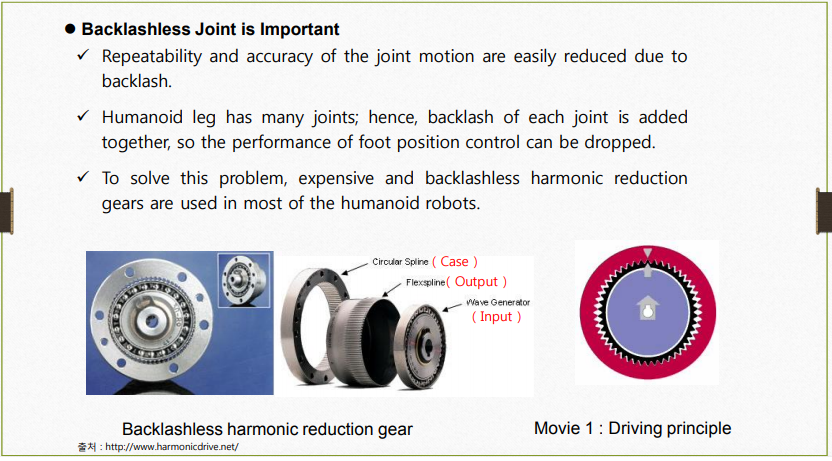
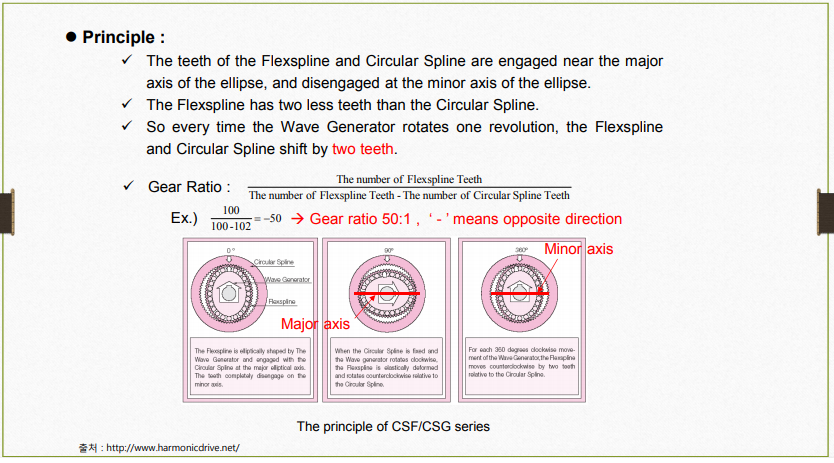
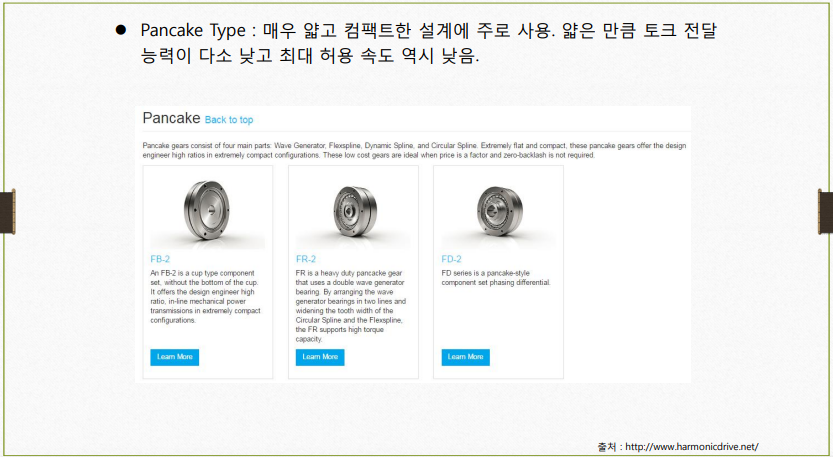
이렇게 생겻고 이빨의 개수가 다르기 때문에 더 많이 회전하거나 더 적게 회전하게 할 수 있다
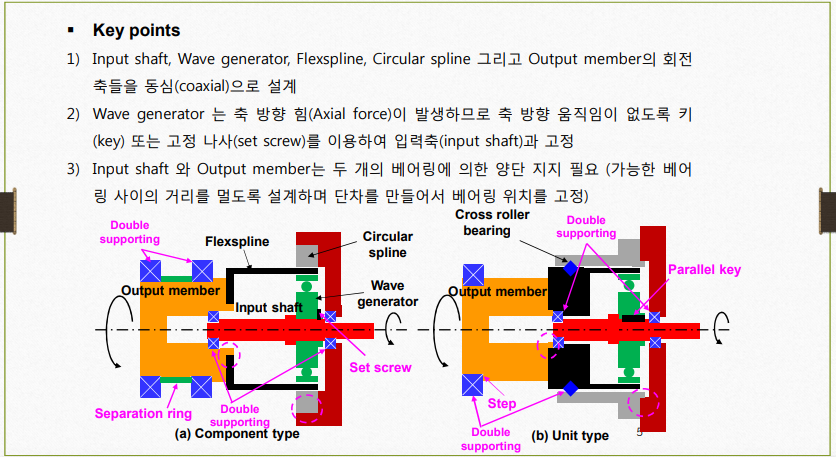
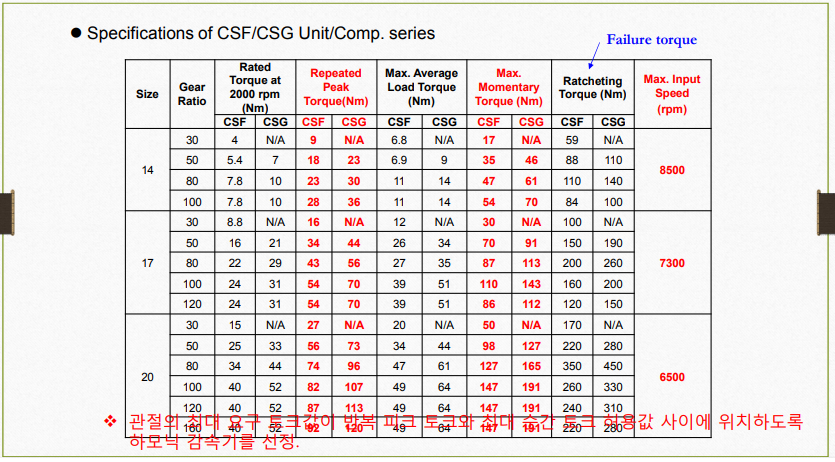
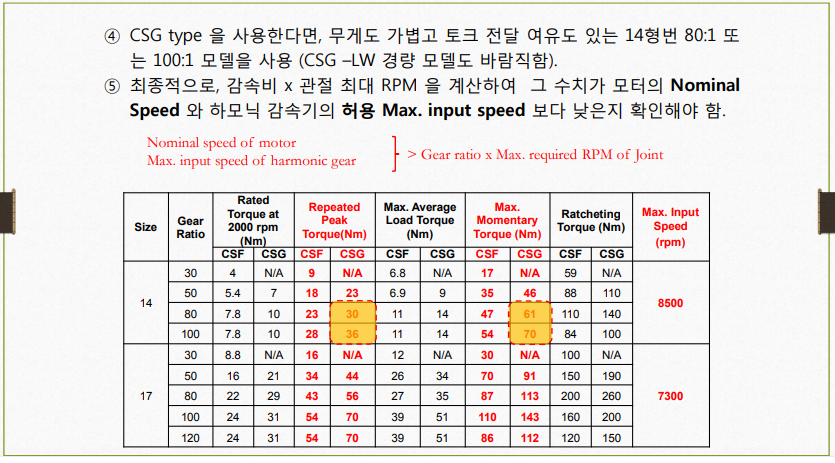
### 콤포넌트 타입
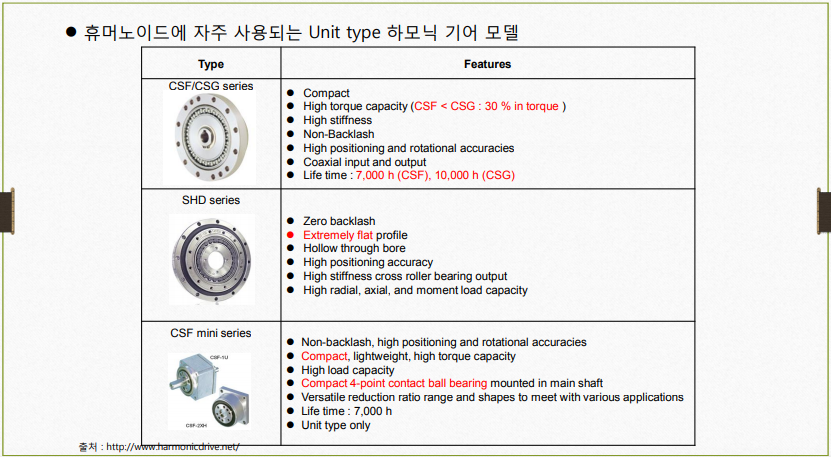
CSF 보다 CSG 가 신규 모델
좀 더 좋다 하지만 비싸다

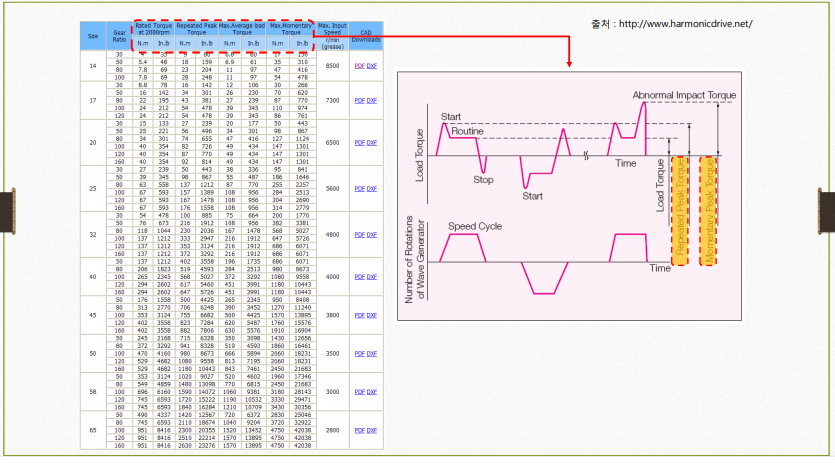
Grear Ratio : 배율이다 모터의 한번 회전에 대한 배율 을 뜻한다
Ratcheting torque : 이 이상이면 망가진다


감속기 나는 별로 쓸 생각이 없는데 어떻게 될지 모르겟다
감속기가 아닌 실제 토크의 사용으로 빠른 속도를 사용할 계획이다
| 휴머노이드 8주차 다리 (0) | 2020.06.06 |
|---|---|
| 휴머노이드 5주차 구동기의 종류 (0) | 2020.06.02 |
| 휴머노이드 4주차 관절 운동 해석 (0) | 2020.05.17 |
| 휴머노이드 3주차 인간과 휴머노이드 비교 (0) | 2020.05.16 |
| 휴머노이드 2주차 인체측정학 보행 메커니즘 (0) | 2020.05.16 |
Or71nH
### 구동기의 3가지

Electric actuator : 전기식 모터
Hydraulic actuator : 유압 기동기
Pneumatic actuator : 공압 기동기
### DC 모터

DC 모터는 영구 자석과 코일로 이루어져 있으며
문제점 코일이 같이 회전하다 보니깐 코일의 전기가 불안정하다
하지만 BLDC 는 영구자석이 회전체와 붙어 있기 때문에 좀더 안정적이다
BLDC 는 자석의 회전을 센싱해야 하기 때문에 복잡성이 좀더 증가한다
### AC 와 RC

### 공압식 구동기
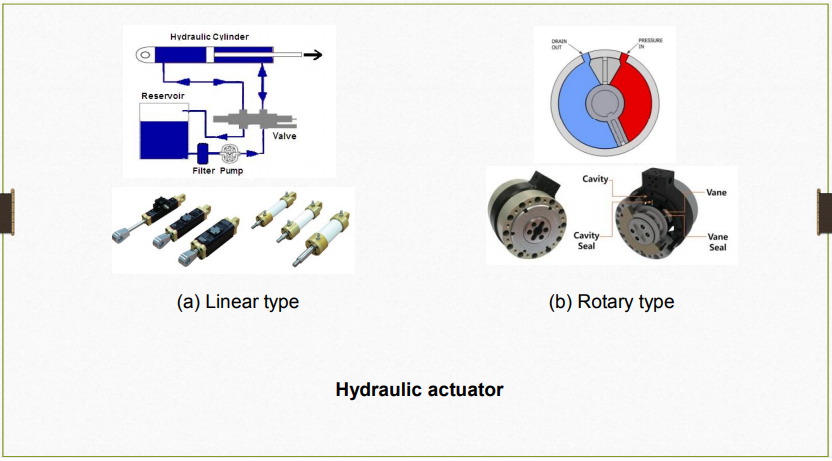
공압 구동기는 Linear type 과 Rotary type 가 있는데 공압구동기를 말아서 만든것이 Rotary 타입이다
머슬 타입도 있는데 근육의 구조와 비슷하게 동작하는 수축 팽창 식의 구동기이다
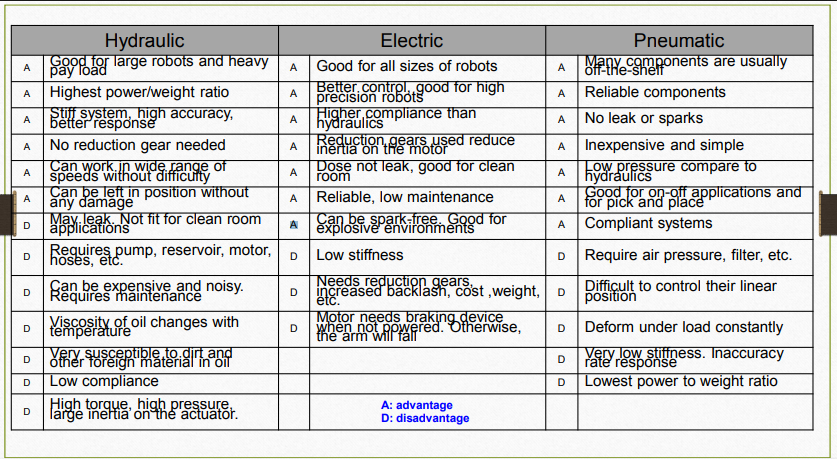
이렇게 장단점을 나누어준 표가 있다

최종적으로 전기 모터가 좋은데
브레이킹 시스템 즉 전기가 공급이 멈쳤을 때의 멈춤을 고정할 것이 필요하다
최종 전기식을 이용하여 사용하는것이 좋을듯하다

구조에 필요한 큰 분류들
### DC 모터의 구동 원리

입력전합 - 역기전력
저항
$ 역기 전력 : 발전기의 원리와 비슷하다고 한다
속도가 빠를 수록 전압이 거의 0 으로 간다
입력 전압에 대한 최대속도가 정해져 있고 그 속도로 맞추어 속도가 증가한다
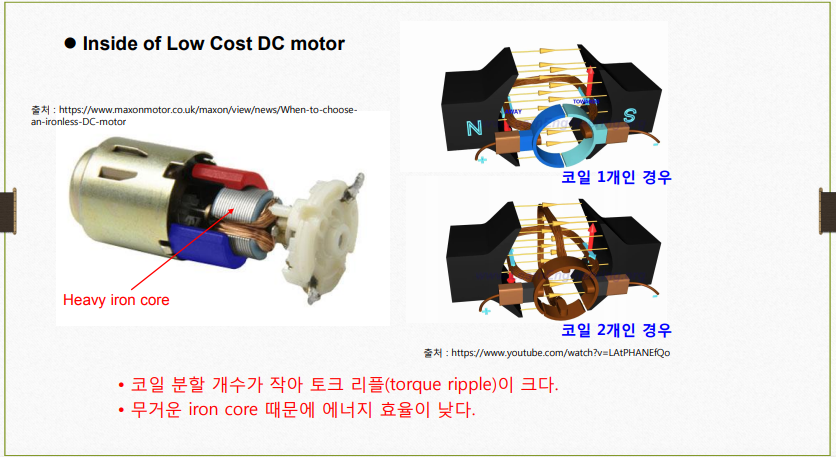
피크토크라 하는 코일이 힘을 최대로 받을 수 있는 구조를 말하는거 같다
피크 토크를 많게 만들어야지 부드러운 움직임이 될 수 있기 때문에 많은 코일이 좋다

위와같이 한바퀴를 돌때 여러개가 있어서 토크(힘)의 출력이 부드러워 진다

Nominal voltage 공칭 전압 : 기준전압
Stall torque 정지 시 기동 토크 : 역기전력이 제로일 때의 토크
Nominal torque 공칭 토크 : 최대 연속 토크 모터가 무리되지않는 토크
Starting current 시동 전류 : 토크 발생에 필요한 전류
Nominal currnet 공칭 전류 : 최대 연속 전류
Nominal speed 공칭 속도 : 연속적 회전에도 모터에 무리가 가지않는 속도
No-load speed 무부하 속도 : 공칭 전압, 기준전압을 인가했을 때 발생하는 최대 속도 (무부화 속도가 최저 속도이다)
Torque constant 토크 상수 : 1암페어의 전류가 발생하는 토크
Motor size and weight 모터 크기 및 중량 : 크기와 중량
### 모터 효율

Pe = Pj + Pm
익랙트리컬 파워 = 준 파워 + 미케니컬 파워
전기 힘 = 손실 힘 + 실제 힘
이렇게 생각하면 된다
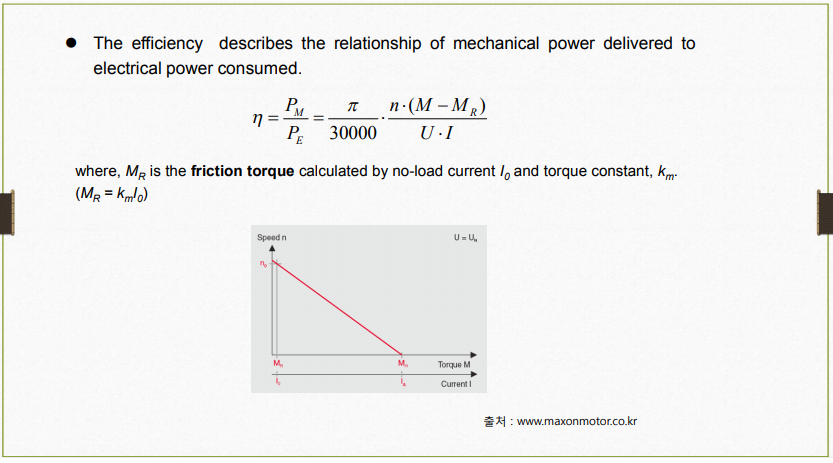

정지시 효율 이 zore라 나온다
그리고 1/7 정도에 최대 효과를 볼 수 있다
이 효율 이 높은 토크에서 하는 것이 좋다
### 전격 파워

모터에 무리가 가지않는 선의 힘을 말하 기 때문에 지속적으로 사용할 수 있도록 하는 방법이다
빨간 부분은 괜찮지만
흰부분은 냉각이나 복구를 해줘야 되는 구간이다
예
공칭 전압 24v , 공칭 전류 3A, 효율 85%
24V * 3A * 0.85 = 61 watt
공칭전압 24V, 정격 일률 90 Watt , 효율 85%
90W/ 24V/ 0.85 = 4.4A
이렇게 구하는것이 가능하다

### 모터 비교
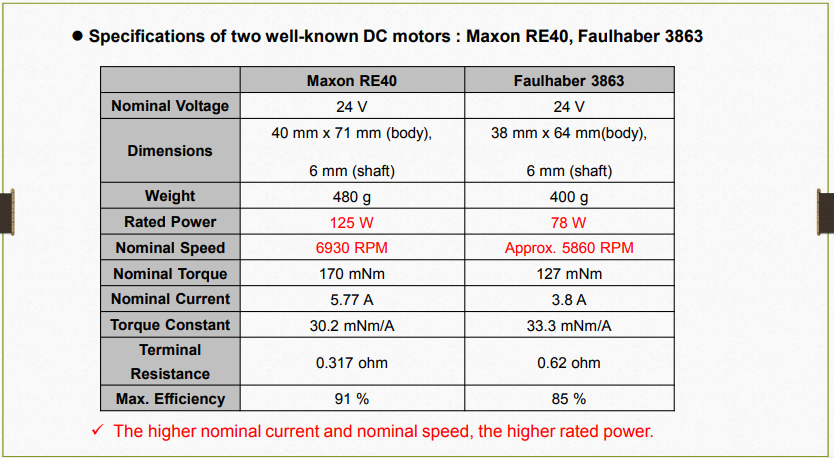
힘이 좋은 것 RE40
저속도에서 효율 이좋은것은 3863
###DC 모터 선정
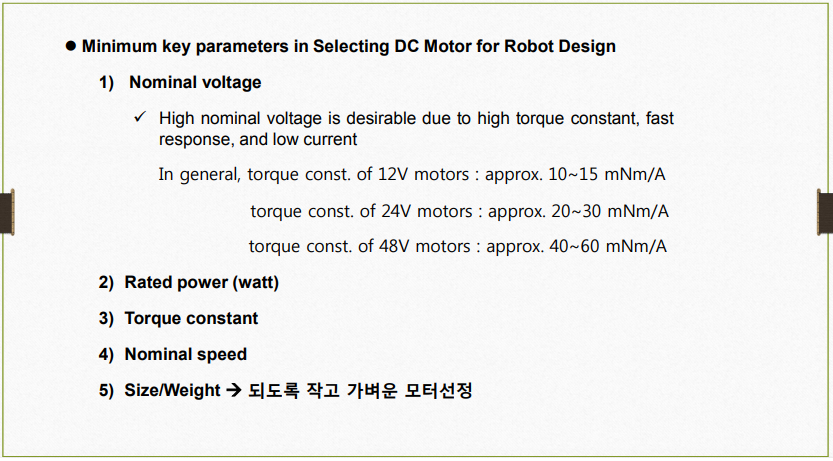
필요한 힘을 분석하는 것이 중요하다
필요한 만큼의 힘에 대등한 제품을 사용해야 좋다

Precision Drive Systems by maxon | maxon group
맥슨의 IDX 드라이브는 EC-i 테크놀로지를 기반으로 한 모터와 자석식 절대 엔코더(Single-turn) 및 필드 지향 제어(FOC) 기능이 내장된 EPOS4 위치 제어장치로 이루어져 있습니다. 고품질 설계로 인해 IP
www.maxongroup.co.kr
: https://www.faulhaber.com/en/products/
You are being redirected...
www.faulhaber.com
이렇게 들어가서 모터를 볼 수 있다
| 휴머노이드 8주차 다리 (0) | 2020.06.06 |
|---|---|
| 휴머노이드 6주차 하모니 감속기 (0) | 2020.06.03 |
| 휴머노이드 4주차 관절 운동 해석 (0) | 2020.05.17 |
| 휴머노이드 3주차 인간과 휴머노이드 비교 (0) | 2020.05.16 |
| 휴머노이드 2주차 인체측정학 보행 메커니즘 (0) | 2020.05.16 |
Or71nH
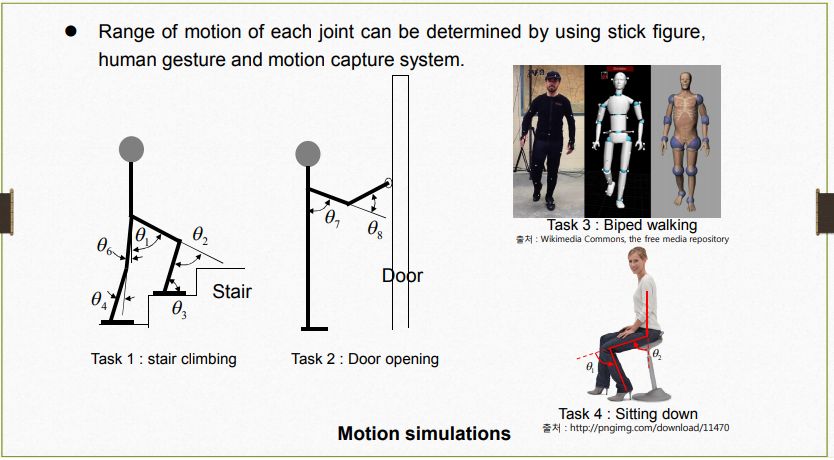
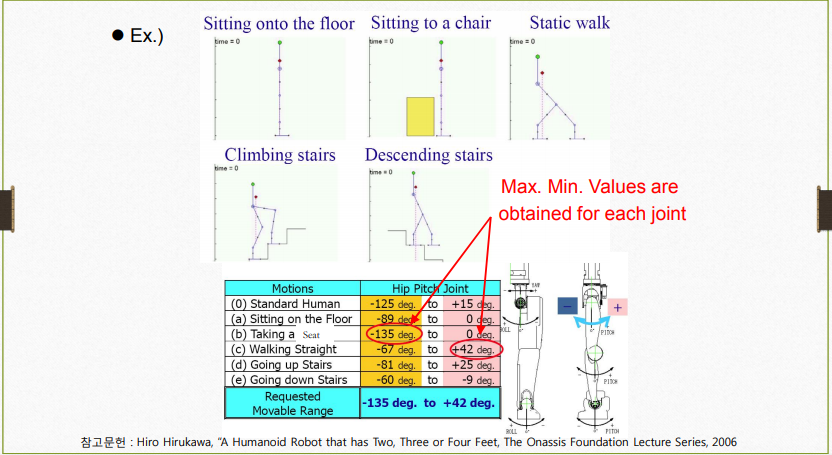
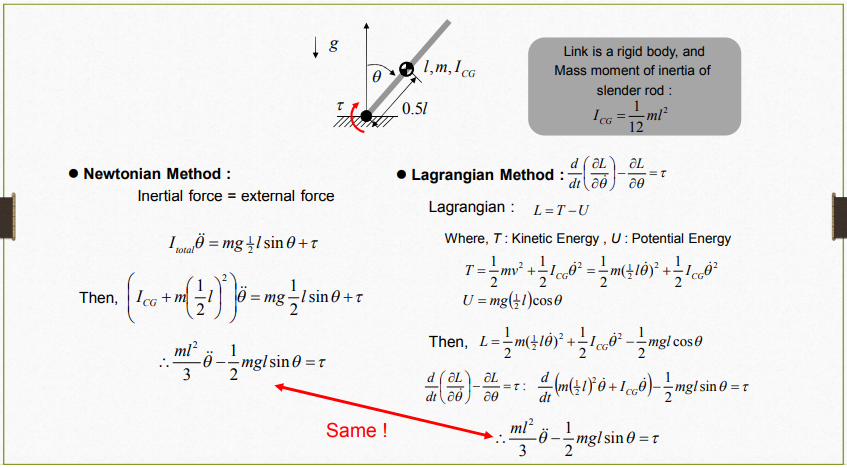
힘 해석 방법
동적 힘해석 ( 역 동역학 해 )
움직임의 위치를 기반으로 분석하는 것
정적 힘 해석
관절에 힘이 가애지는 자세 선정을 한다
관절의 힘공식
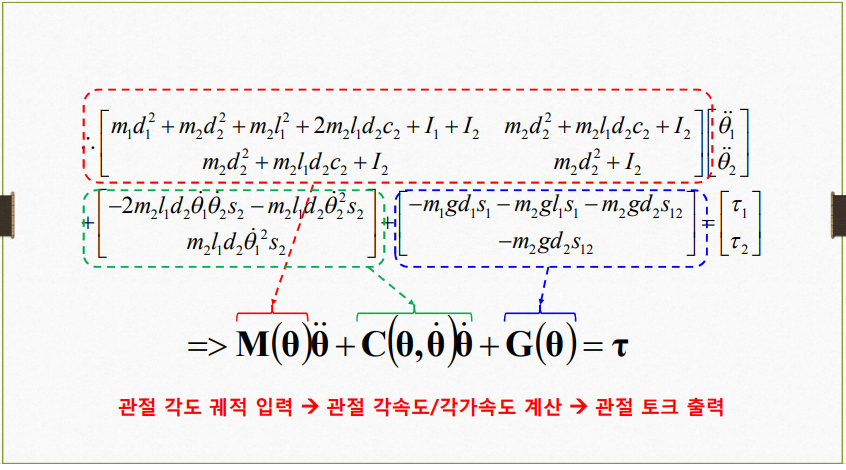
운동방정식

M : 관성 행렬
C : 구심력 행렬
G : 중력 행렬
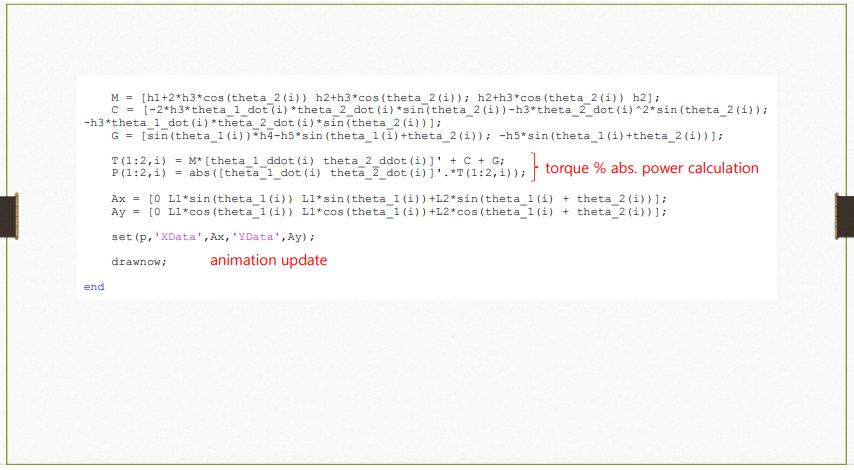
관성력 계산하기

식은 잘 이해되지않지만

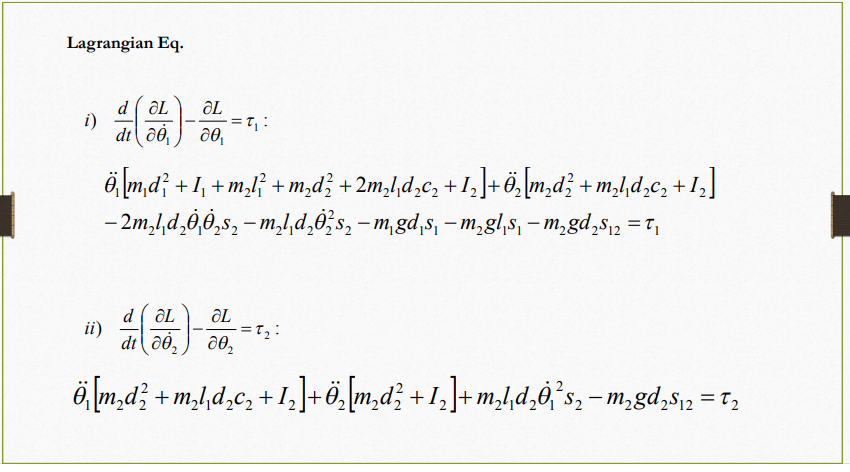
이렇게 복잡하게 구할 필요가 있을까?


### 정적 힘 해석
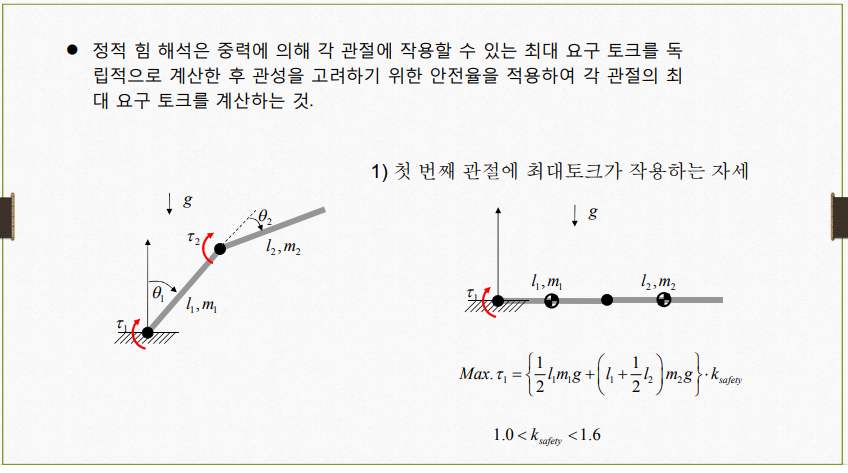


이런식으로
| 휴머노이드 6주차 하모니 감속기 (0) | 2020.06.03 |
|---|---|
| 휴머노이드 5주차 구동기의 종류 (0) | 2020.06.02 |
| 휴머노이드 3주차 인간과 휴머노이드 비교 (0) | 2020.05.16 |
| 휴머노이드 2주차 인체측정학 보행 메커니즘 (0) | 2020.05.16 |
| 휴머노이드 1주차 (0) | 2020.05.16 |
Or71nH
관절의 구조의 차이
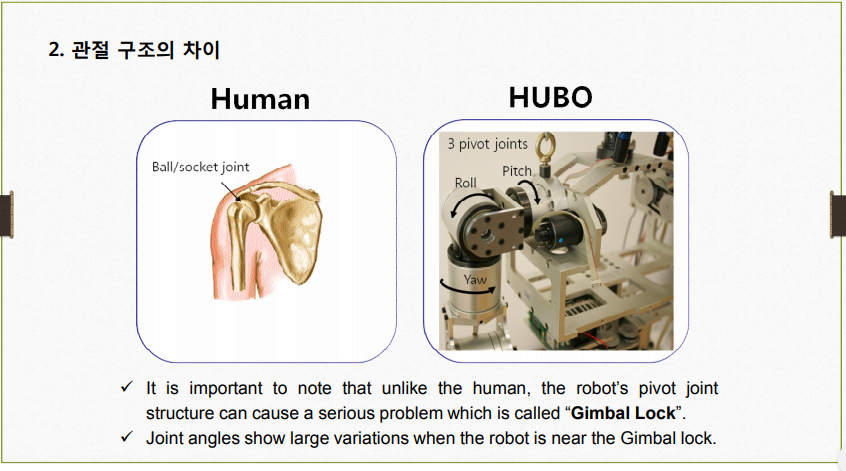

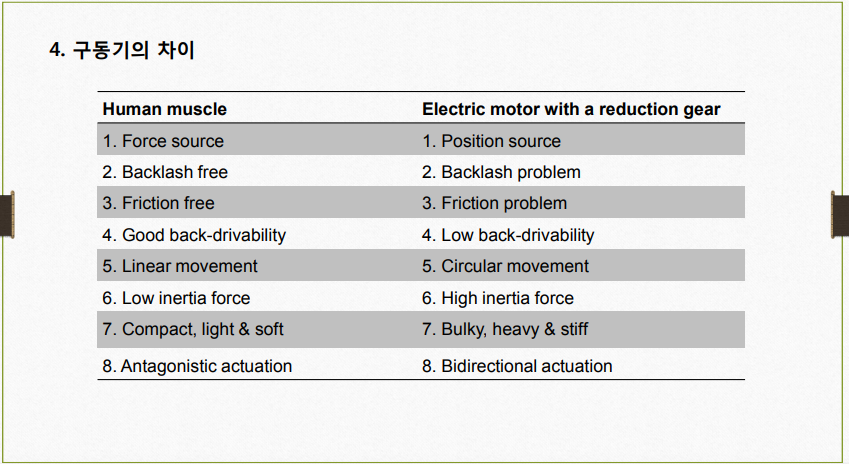
여러가지 차이점중에 유연성이 차이점이 크다
예를들어 사람의 손에 힘을빼면 상대가 움직이기가 쉽다 하지만 로봇은 고정이 되어 움지이기가 힘들다
상반되는 근육으로 고정움직임을 할 수 있다
### 휴머노이드 로봇 개념 설계안
misumi 사이트를 이용하여 규격화된 제품들을 구매할 수 있다
조립식 디자인
저비용으로 많은것을 할 수 있다
모놀리식 디자인
고비용으로 세밀하게 만들수 있다
무게 부피를 줄이며 힘을 낼수 있는 방안이 필요핟
배터리의 문제
에너지가 높은 배터리를 사용하여
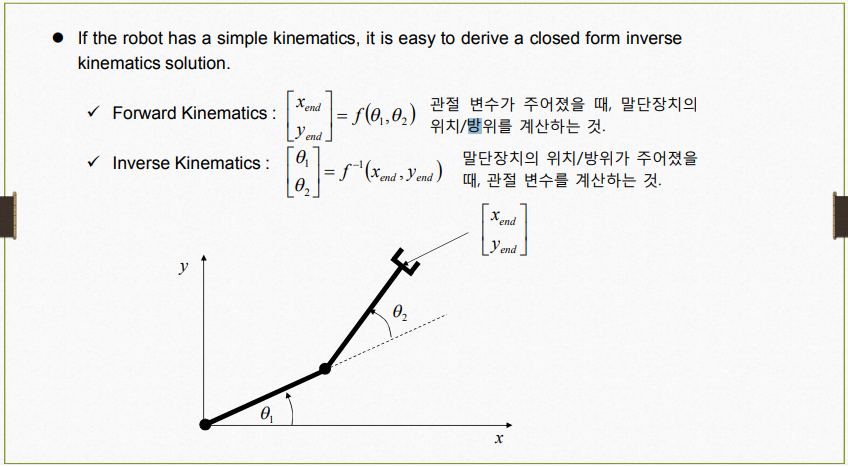
### 관절의 움직임
Forward Kinemtics 와 Inverse Kinematics 가 있다

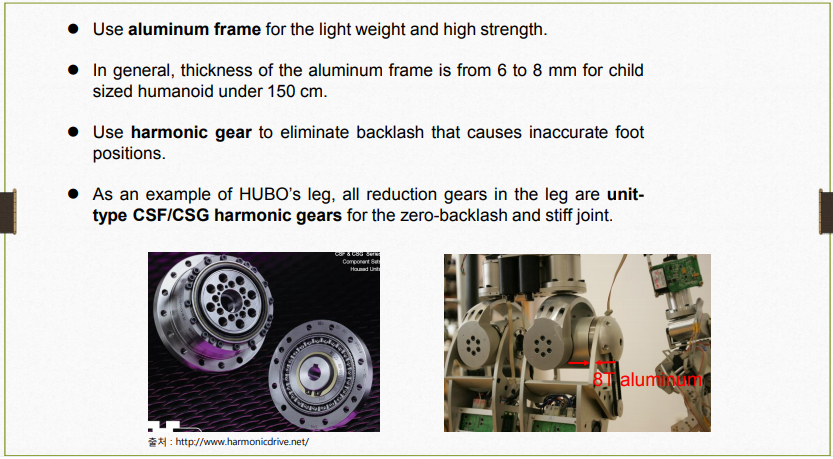
백래쉬를 적개하기위한 방법으로 하모닉 기어를 많이 쓴다

기어 비교

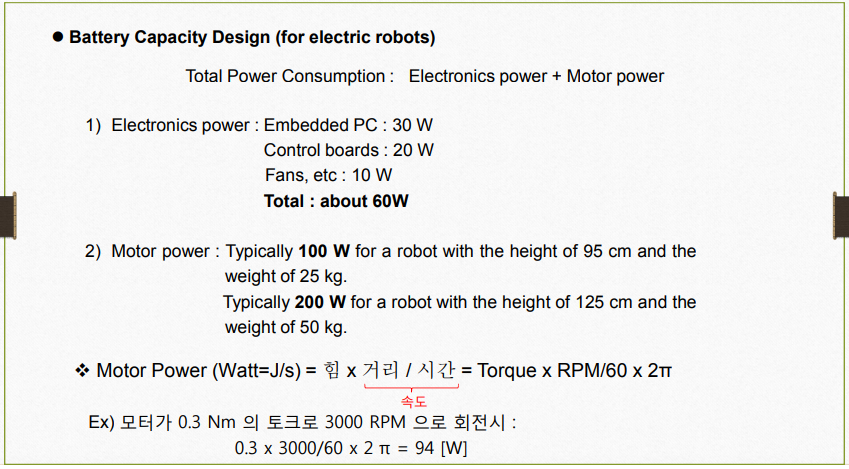
이제 베터리에 관하여 예기해보자
W 에따른 힘 출력 이다

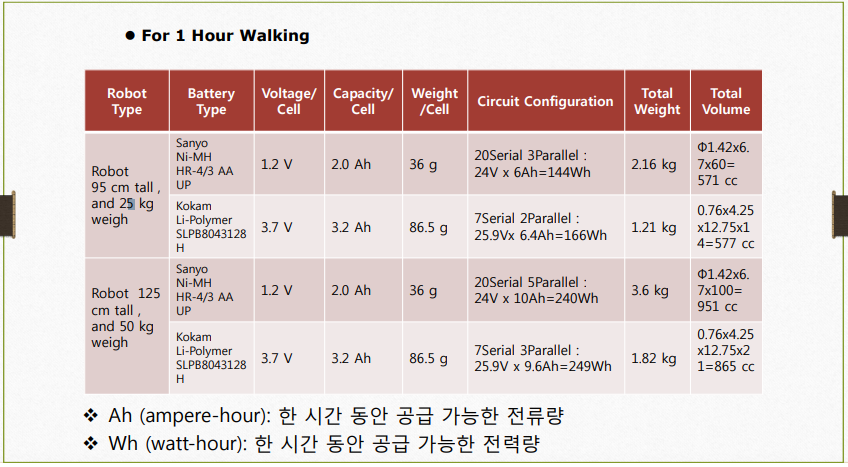
Ah : 한 시간 동안 공급 가능한 전류량
Wh : 한시간 동안 공급 가능한 전력량
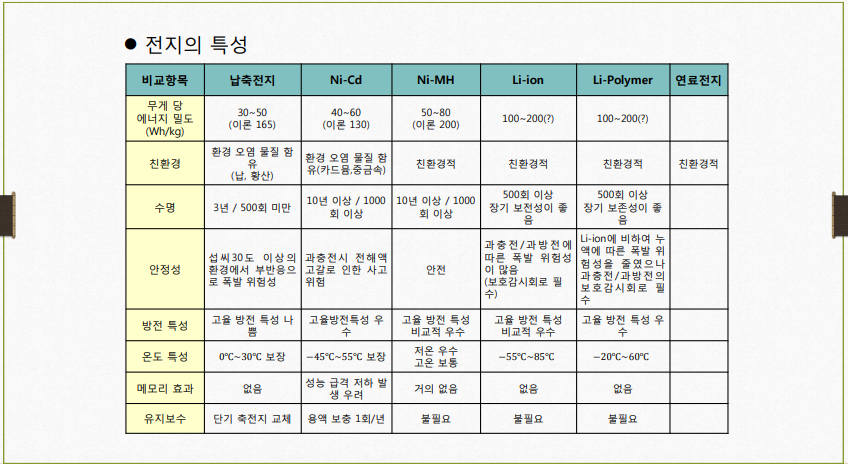
전지 비교한 것이다 전지중 리툼 계열이 아직까진 좋은거 같다
| 휴머노이드 6주차 하모니 감속기 (0) | 2020.06.03 |
|---|---|
| 휴머노이드 5주차 구동기의 종류 (0) | 2020.06.02 |
| 휴머노이드 4주차 관절 운동 해석 (0) | 2020.05.17 |
| 휴머노이드 2주차 인체측정학 보행 메커니즘 (0) | 2020.05.16 |
| 휴머노이드 1주차 (0) | 2020.05.16 |
Or71nH